AHAC 2020 Workshop
AHAC 2020 Workshop
Flying with LoRa
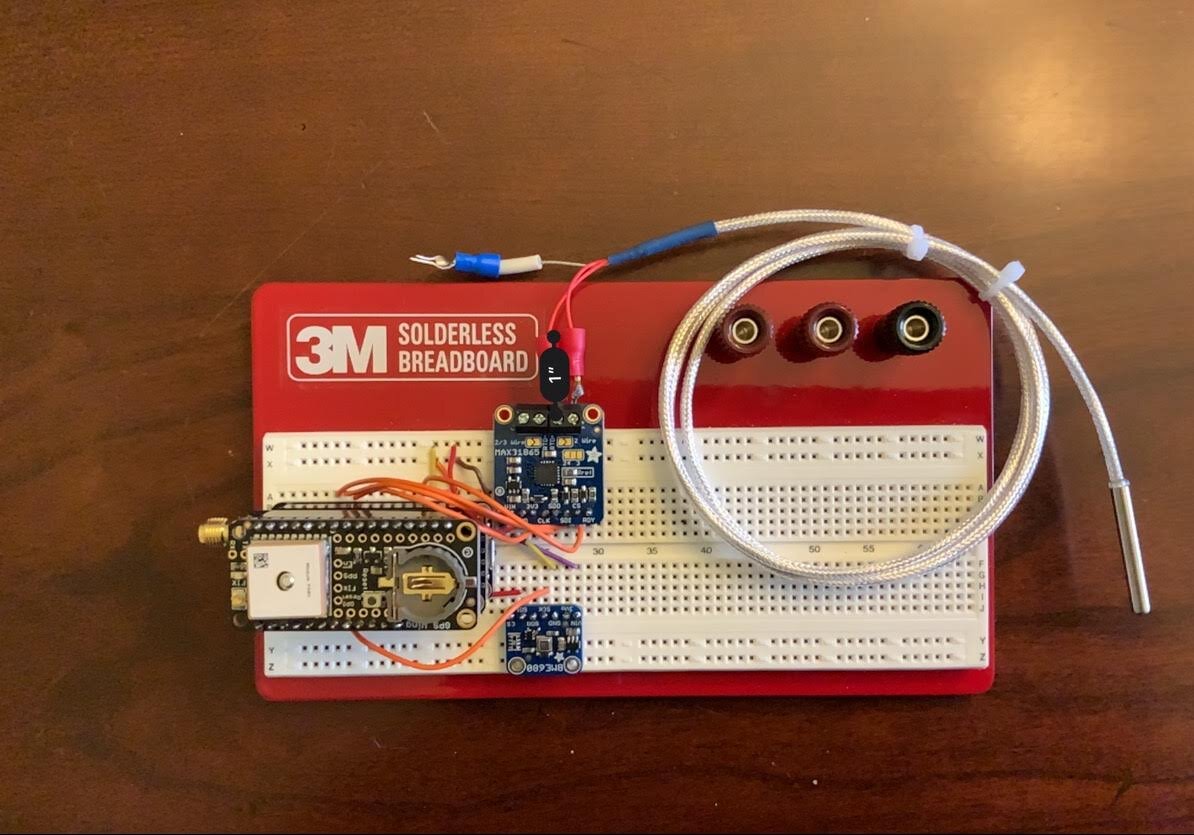
LoRa is a new radio modulation scheme that allows for long range communication using low power transmitters. In recent years these transmitters have become available in a variety of prototype boards including Adafruit's Feather Wing boards. These boards, when paired with Adafruit's M4 or M0 feather boards, allow for a very powerfully computing device with long range communication. Recently, students at Iowa State University have been testing these boards on several high altitude balloon flights and the tests have been very successful.
This workshop will have participants learn about LoRa technology and also on creating your own tracking system that can be used on high altitude balloons. We will use CircuitPython to program an Adafruit M0/M4 feather board. We will also pair this with Adafruit's GPS wing which will give you a full tracking system in a compact package. This workshop will be virtual. We encourage that everyone purchase the components ahead of time so they can follow along with the workshop. A full list of components and where to buy will be provided before the workshop.
Components
If you wish to follow along during the workshop, we recommend the following components.

Feather M0/M4
We will be using CircuitPython for the code used in the workshop. We would recommend either the Feather M0 Express or the Feather M4 Express. Both boards have a Cortex ARM processor and the Express boards were designed for CircuitPython and have extra storage for supporting libraries. We also recommend that you download the Mu Editor and the CircuitPython image file and libraries for your board. Links are below.

LoRa Feather Wing
The LoRa feather wing interfaces between our Feather M0/M4 express board to the LoRa radio that is used to transmit and receive our packets. There are several versions of this board. We commend either the 433 MHz or 900 MHz board. Please make sure it uses the RFM 9x chipset.

GPS Feather Wing
The GPS Feather Wing will provide our position information. We have tested these boards at altitude and they do work above 60K feet. To help with faster time for the GPS to get a lock, we recommend installing the battery as well.
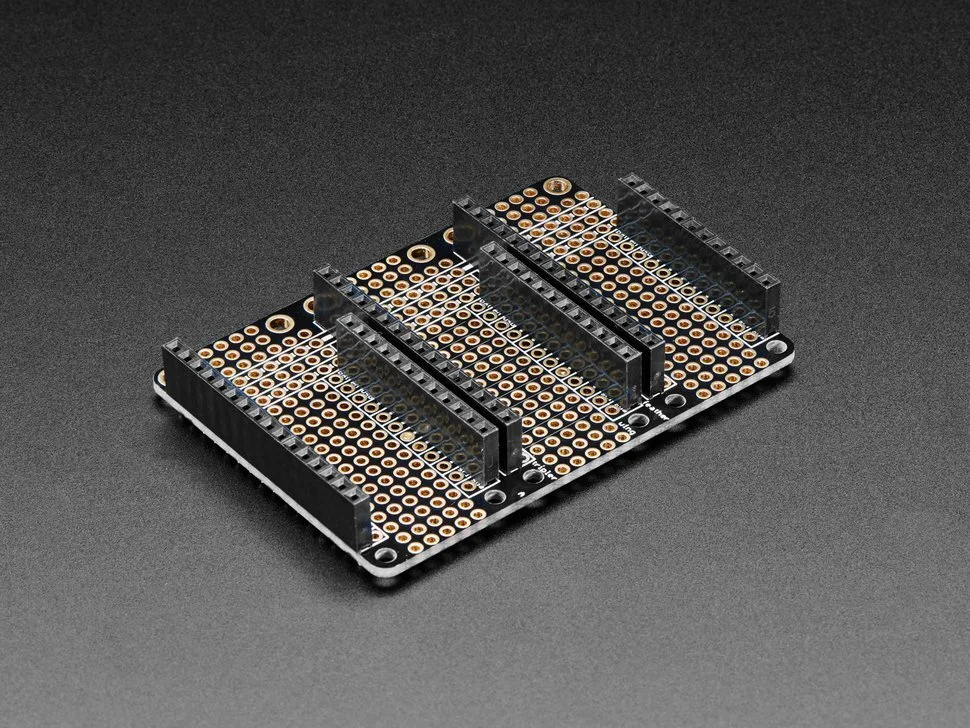
FeatherWing Tripler
The FeatherWing tripler is an optional component but can help when doing development with these boards. This may also be a better way to mount your boards then by stacking them.
Additional components
The above components will get you started. You will want to a good USB cable. The USB cable will provide power and data connection for the Feather M4 and that will be enough to power both the GPS and the LoRa board. For an actual flight though, you may want some additional components. These components may be:
External Antenna for LoRa
External antenna for GPS
Li-Ion battery
The Feather boards support any 3.7 VDC (single cell) Li-Ion battery. The feather can also charge the battery when connected to USB. It will also automatically switch from USB to Li-Ion and vice versa.
The GPS feather wing has a port for an external GPS (although our testing worked fine with the internal antenna). However, we do recommend an external antenna for the LoRa. This can be a simple 1/4 wavelength dipole cut to the frequency of your board. You can also use a commercial antenna and the board has a spot to solder a SMA connector as well.